12. Localization: Testing
Testing
Now, let us test the performance of your AMCL package! You have two options to control your robot while it localize itself here:
-
Send
navigation goalvia RViz -
Send move command via
teleoppackage.
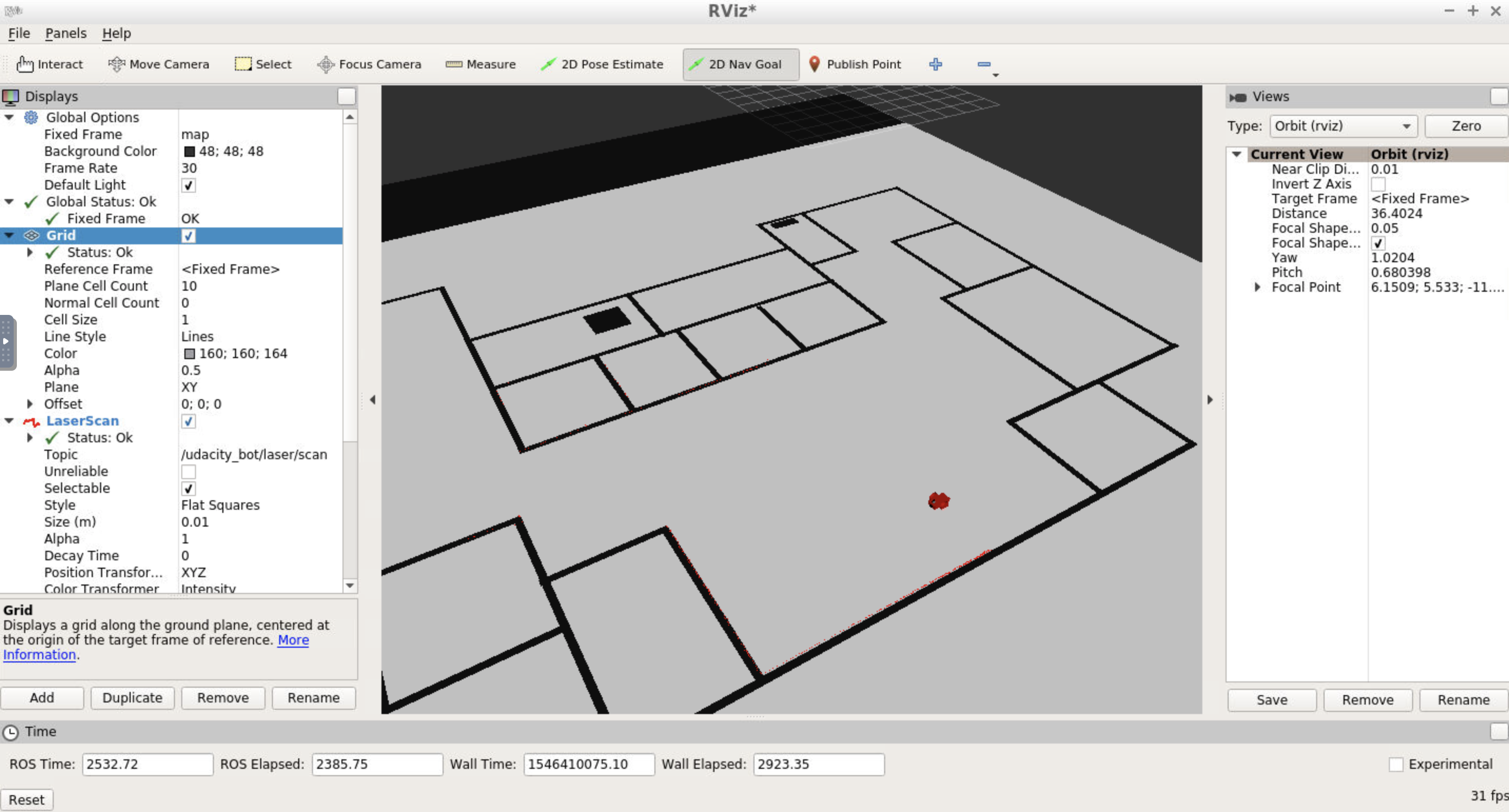
Navigate your robot, observe its performance and tune your parameters for AMCL! Capture screenshots and include them in your project submission.
Option 1: Send
2D Navigation Goal
Your first option would be sending a
2D Nav Goal
from RViz. The
move_base
will try to navigate your robot based on the localization. Based on the new observation and the odometry, the robot to further perform the localization.
Click the
2D Nav Goal
button in the toolbar, then click and drag on the map to send the goal to the robot. It will start moving and localize itself in the process. If you would like to give
amcl
node a nudge, you could give the robot an initial position estimate on the map using
2D Pose Estimate
.
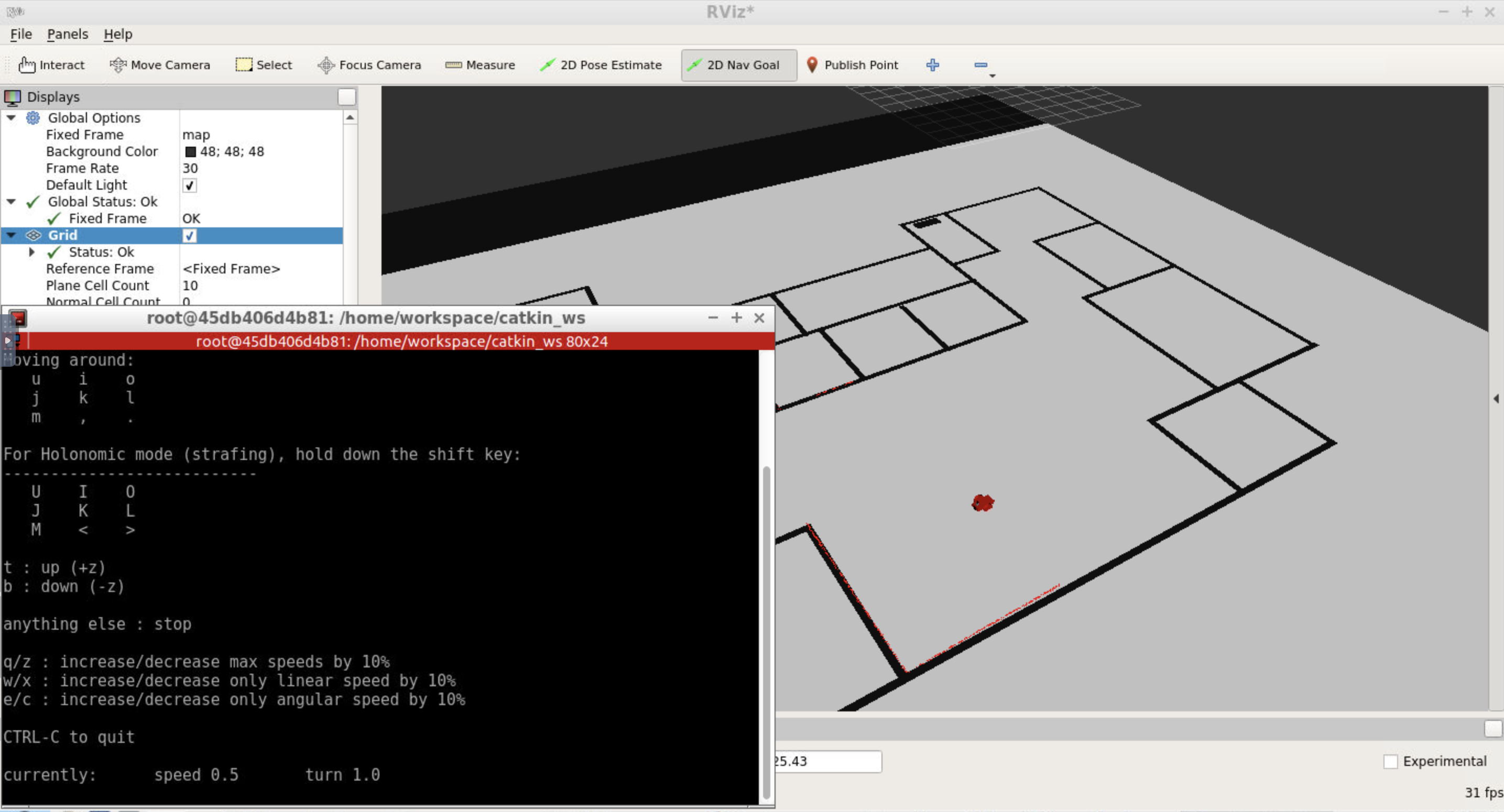
Option 2: Use
teleop
Node
You could also use
teleop
node to control your robot and observe it localize itself in the environment, if you have set it up in the
Optional: Teleop Package
part.
Open another terminal and launch the
teleop
script:
rosrun teleop_twist_keyboard teleop_twist_keyboard.pyYou could control your robot by keyboard commands now.